Equations of Elasticity in Static Case
This section presents the equation of elasticity in stationary case and axisymetric case.
1. In General Case
1.1. Differential Formulation
We search the displacement \(\mathbf{u} \in \mathbb{R}^3\) induced by a transformation. The domain of resolution is \(\Omega_c\) with bounds \(\Gamma_c\), \(\Gamma_{D \hspace{0.05cm} elas}\) the bound of Dirichlet conditions, \(\Gamma_{N \hspace{0.05cm} elas}\) the bound of Neumann conditions and \(\Gamma_{R \hspace{0.05cm} elas}\) the bound of Robin conditions such that \(\Gamma_{D \hspace{0.05cm} elas} \cup \Gamma_{N \hspace{0.05cm} elas} \cup \Gamma_{R \hspace{0.05cm} elas} = \Gamma_c\).
We introduce the Lamé’s coefficients :
With :
-
Young modulus \(E\), it represents the rigidity of materials (\(10^5 \leq \lambda \leq 10^{10}\))
-
Poisson’s coefficient \(\nu\), it represents the incompressibility of materials (\(0 \leq \mu \leq 0.5\)). If \(\mu = 0.5\), the materials is perfectly incompressible.
Conversely :
We introduce the tensor of small deformations :
And, the stress tensor :
With \(C\), a law which determenized by material.
The equilibrium equations with boundary conditions of Dirichlet, Neumann and Robin is written like :
With :
-
Displacement \(\mathbf{u} = \begin{pmatrix} u_x \\ u_y \\ u_z \end{pmatrix}\)
-
Stress Tensor : \(\bar{\bar{\sigma}}\)
-
Stiffness tensor : \(k\)
-
Volumic Forces : \(\mathbf{F}\)
And notations :
-
Divergence of tensor : \(\nabla \cdot \bar{\bar{\sigma}} = \begin{pmatrix} \nabla \cdot \bar{\bar{\sigma}}_{x,:} \\ \nabla \cdot \bar{\bar{\sigma}}_{y,:} \\ \nabla \cdot \bar{\bar{\sigma}}_{z,:} \end{pmatrix} = \begin{pmatrix} \frac{\partial \bar{\bar{\sigma}}_{xx}}{\partial x} + \frac{\partial \bar{\bar{\sigma}}_{xy}}{\partial y} + \frac{\partial \bar{\bar{\sigma}}_{xz}}{\partial z} \\ \frac{\partial \bar{\bar{\sigma}}_{yx}}{\partial x} + \frac{\partial \bar{\bar{\sigma}}_{yy}}{\partial y} + \frac{\partial \bar{\bar{\sigma}}_{yz}}{\partial z} \\ \frac{\partial \bar{\bar{\sigma}}_{zx}}{\partial x} + \frac{\partial \bar{\bar{\sigma}}_{zy}}{\partial y} + \frac{\partial \bar{\bar{\sigma}}_{zz}}{\partial z} \end{pmatrix}\)
-
Scalar produce of tensor : \(\bar{\bar{\sigma}} \cdot \mathbf{n} = \begin{pmatrix} \bar{\bar{\sigma}}_{x,:} \cdot \mathbf{n} \\ \bar{\bar{\sigma}}_{y,:} \cdot \mathbf{n} \\ \bar{\bar{\sigma}}_{z,:} \cdot \mathbf{n} \end{pmatrix} = \begin{pmatrix} \bar{\bar{\sigma}}_{xx} \, n_x + \bar{\bar{\sigma}}_{xy} \, n_y + \bar{\bar{\sigma}}_{xz} \, n_z \\ \bar{\bar{\sigma}}_{yx} \, n_x + \bar{\bar{\sigma}}_{yy} \, n_y + \bar{\bar{\sigma}}_{yz} \, n_z \\ \bar{\bar{\sigma}}_{zx} \, n_x + \bar{\bar{\sigma}}_{zy} \, n_y + \bar{\bar{\sigma}}_{zz} \, n_z \end{pmatrix}\)
In the rest of this section, we use the Hooke law :
It can rewrite like :
And the Thermal Dilatation law :
With linear dilatation coefficient \(\alpha_T\), \(T\) the temperature and \(T_0\) the temperature of reference (or rest temperature).
Thus, the stress tensor is writen like :
Or :
1.2. Weak Formulation
We express the weak formulation of (Static Elasticity) component by component.
We will here deal only with strong Dirichlet conditions (on \(\Gamma_{D \hspace{0.05cm} elas}\)) that is why the function space is set to \(H^1_{u_0}(\Omega) = \{ u \in H^1(\Omega), \ u = u_0 \text{ on } \Gamma_{D \hspace{0.05cm} elas} \}\).
By multiplying the x component of (Static Elas-1) by \(\xi_x\) of \(\mathbf{ξ} = \begin{pmatrix} \xi_x \\ \xi_y \\ \xi_z \end{pmatrix} \in H^1_{u_0}(\Omega)\) and integrating over \(\Omega_c\), we obtain :
By the Formula of Green (First Form) :
With notations :
We apply the boundary conditions :
We do the same with \(y\) and \(z\) components and we obtain the weak formulation of (Static Elasticity) component by component :
To obtain the vectorial form, we sum the three equations :
2. In axisymmetric coordinates
2.1. Differential Formulation
On equations (Static Elasticity), we suppose the geometry and the parameters are independent by \(\theta\) (of cylindric coordinates \((r,\theta,z)\)).
We note \(\Omega^{axis}_c\) (respectively \(\Gamma_c^{axis}\), \(\Gamma_{D \hspace{0.05cm} elas}^{axis}\), \(\Gamma_{N \hspace{0.05cm} elas}^{axis}\) and \(\Gamma_{R \hspace{0.05cm} elas}^{axis}\)) the representation of \(\Omega_c\) (respectively \(\Gamma_c\), \(\Gamma_{D \hspace{0.05cm} elas}\), \(\Gamma_{N \hspace{0.05cm} elas}\)) and \(\Gamma_{R \hspace{0.05cm} elas}\) in axisymmetric coordinates.
We note \(\mathbf{u} = \begin{pmatrix} u_r \\ u_{\theta} \\ u_z \end{pmatrix}_{cyl}\) the coordinates of \(u \in \mathbb{R}^3\) in cylindrical base and by abuse of language, \(\mathbf{u} = \begin{pmatrix} u_r \\ u_z \end{pmatrix}_{axis}\) the coordinates of \(u \in \mathbb{R}^3\) in axisymmetrical base.
We note \(\mathbf{n}^{axis} = \begin{pmatrix} n^{axis}_r \\ n^{axis}_z \end{pmatrix}_{axis}\) the exterior normal of \(\Gamma^{axis}\) on \(\Omega^{axis}\).
The tensor of small deformations becomes :
And the stress tensor :
We have in cylindrical coodinates :
We do a rating abuse :
Or, in the other form :
With \(\bar{\bar{\sigma}}_{r,:} = \begin{pmatrix} \bar{\bar{\sigma}}_{rr} & \bar{\bar{\sigma}}_{rz} \end{pmatrix}\) and \(\bar{\bar{\sigma}}_{z,:} = \begin{pmatrix} \bar{\bar{\sigma}}_{rz} & \bar{\bar{\sigma}}_{zz} \end{pmatrix}\)
With : \(\nabla \cdot \bar{\bar{\sigma}} = \begin{pmatrix} \nabla \cdot \bar{\bar{\sigma}}_{r,:} + \frac{\bar{\bar{\sigma}}_{rr} - \bar{\bar{\sigma}}_{\theta \theta}}{r} \\ \nabla \cdot \bar{\bar{\sigma}}_{z,:} + \frac{\bar{\bar{\sigma}}_{rz}}{r} \end{pmatrix}_{axis}\)
2.2. Weak Formulation
This section follows the calculus of book Theorical Physics Reference.
To obtain the weak formulation of axisymetric elastic equation, we pass by the weak formulation of elastic problem in cartesian (Weak Static Elasticity).
We have the formula of changement to cartesian to cylindric :
The x component of (Weak Static Elasticity) becomes :
And the y :
Adding these two equations :
The interior of integrals are independant by \(\theta\) :
In the other hand, the z component becomes :
This gives us :
The interior of integrals are independant by \(\theta\) :
Thus, we have the weak formulation for axisymetric problem Component by Component :
Finally, to have the vectorial form :
2.3. Adaptation to CFPDEs
CFPDEs is an application of software Feel++. It solve by finite element the equations of form :
There are two ways to implement (Static Elasticity Axis) :
-
Components by components
-
Vectorial
2.3.1. Components by components
For this resolution, we enter the (Static Elasticity Axis) in two equations with radial component and vertical component.
The application CFPDEs solves the equation of the form :
Set the domain of resolution \(\Omega \subset \mathbb{R}^d\)
With :
Symbol |
Description |
Dimension |
|
scalar unknown |
\(1\) |
|
damping or mass coefficient |
\(1\) |
|
diffusion coefficient |
\(1\) or \(2 \times 2\) |
|
conservative flux convection coefficient |
\(2\) |
|
conservative flux source term |
\(2\) |
|
convection coefficient |
\(2\) |
|
absorption or reaction coefficient |
\(1\) |
|
source term |
\(1\) |
To adapt (Weak Static Elasticity Axis), we reorder the equation :
We have two equations :
-
\(\text{(r-(Weak Static Elasticity Axis)}\) of unknow \(u_r\)
-
\(\text{(z-(Weak Static Elasticity Axis)}\) of unknow \(u_z\)
It give the coefficients :
-
For r-component
Coefficient |
Description |
Expression |
\(c\) |
diffusion coefficient |
\(\begin{pmatrix} r (\lambda+2\mu) & 0 \\ 0 & r \mu \end{pmatrix}\) |
\(\alpha\) |
conservative flux convection coefficient |
\(\begin{pmatrix} \lambda \\ 0 \end{pmatrix}\) |
\(\mathbf{γ}\) |
conservative flux source term |
\(\begin{pmatrix} r \left( -\lambda \frac{\partial u_z}{\partial z} + (3\lambda+2\mu) \alpha_T (T-T_0) \right) \\ - r \mu \frac{\partial u_z}{\partial r} \end{pmatrix}\) |
\(\mathbf{β}\) |
convection coefficient |
\(\begin{pmatrix} \lambda \\ 0 \end{pmatrix}\) |
\(a\) |
absorption or reaction coefficient |
\(\frac{\lambda + 2\mu}{r}\) |
\(f\) |
source term |
\(r F_r - \lambda \frac{\partial u_z}{\partial z} + (3\lambda+2\mu) \alpha_T \left( T - T_0 \right)\) |
-
For z-component
Coefficient |
Description |
Expression |
\(c\) |
\(\begin{pmatrix} r\mu & 0 \\ 0 & r (\lambda+2\mu) \end{pmatrix}\) |
|
\(\mathbf{γ}\) |
conservative flux source term |
\(\begin{pmatrix} - r \mu \frac{\partial u_r}{\partial z} \\ r \left( - \lambda (\frac{\partial u_r}{\partial r}+\frac{1}{r} u_r) + (3\lambda+2\mu) \alpha_T (T-T_0) \right) \end{pmatrix}\) |
\(f\) |
source term |
\(r F_z\) |
For the boundary conditions :
-
Dirichlet : we use strong Dirichlet condition, thus we put on JSON file :
-
For the r-equation r-(Weak Static Elasticity Axis) :
"Dirichlet": { "Gamma_Delas" { "expr":"u0r:u0r" } } -
For the z-equation z-(Weak Static Elasticity Axis) :
"Dirichlet": { "Gamma_Delas" { "expr":"u0z:u0z" } }
-
-
Neumann : in the calcul, it appears the Jacobian \(r\), thus we put on JSON file :
-
For the r-equation r-(Weak Static Elasticity Axis) :
"Neumann": { "Gamma_Nelas" { "expr":"r*g_Nr:r:g_Nr" } } -
For the z-equation z-(Weak Static Elasticity Axis) :
"Neumann": { "Gamma_Nelas" { "expr":"r*g_Nz:r:g_Nz" } }
-
-
Robin : in the calcul, it appears the Jacobian \(r\), thus we put on JSON file :
If the stifness matrix \(k\) isn’t diagonal, it appears a coupling between the two equations. But actually, we can’t implement coupling on boundary conditions on CFPDEs. Thus, we suppose that the stifness matrix \(k\) is diagonal (\(k=\begin{pmatrix} k_{00} & 0 \\ 0 && k_{11} \end{pmatrix}\)), the Robin condition is rewrited : \(\left\{ \begin{pmatrix} k_{00} u_r + \bar{\bar{\sigma}}_{r,:} \cdot \mathbf{n}^{axis} = g_r \\ k_{11} u_z + \bar{\bar{\sigma}}_{z,:} \cdot \mathbf{n}^{axis} = g_z \end{pmatrix} \right.\). -
For the r-equation :
"Neumann": { "Gamma_Nelas" { "expr1":"r*k00:r:k00" "expr2":"r*g_Rr:r:g_Rr" } } -
For the z-equation :
"Neumann": { "Gamma_Nelas" { "expr1":"r*k11:r:k11" "expr2":"r*g_Rz:r:g_Rz" } }
-
2.3.2. Vectorial Form
For this resolution, we enter the (Static Elasticity Axis) with radial and vertical components in same equation.
The application CFPDEs solves the equation of the form :
Set the domain of resolution \(\Omega_c \subset \mathbb{R}^2\) and unknow \(\mathbf{u} : \Omega \rightarrow \mathbf{R}^2\)
With :
Symbol |
Description |
Dimension |
|
scalar unknown |
\(2\) |
|
damping or mass coefficient |
\(1\) |
|
diffusion coefficient |
\(1\) or \(2 \times 2\) |
|
conservative flux source term |
\(2 \times 2\) |
|
convection coefficient |
\(2\) |
|
absorption or reaction coefficient |
\(1\) |
|
source term |
\(2\) |
To obtain the coefficients of (Static Elasticity Axis), we reorganize the equation :
We can write thise equation to the form :
With :
\(\hat{c} = \mu\) |
\(\hat{\gamma} = \begin{pmatrix} - \lambda \left( \frac{\partial u_r}{\partial r} + \frac{u_r}{r} + \frac{\partial u_z}{\partial z} \right) - \mu \frac{\partial u_r}{\partial r} - \sigma_T & - \mu \frac{\partial u_z}{\partial r} \\ - \mu \frac{\partial u_r}{\partial z} & - \lambda \left( \frac{\partial u_r}{\partial r} + \frac{u_r}{r} + \frac{\partial u_z}{\partial z} \right) - \mu \frac{\partial u_z}{\partial z} - \sigma_T \end{pmatrix}\) |
\(\hat{f} = \begin{pmatrix} F_r + \frac{2 \mu}{r} \left( \frac{\partial u_r}{\partial r} - \frac{u_r}{r} \right) \\ F_z + \frac{\mu}{r} \left( \frac{\partial u_r}{\partial z} + \frac{\partial u_z}{\partial r} \right) \end{pmatrix}\) |
| \(\hat{c}\), \(\hat{\gamma}\) and \(\hat{f}\) aren’t the CFPDEs coefficients of (Static Elasticity Axis). |
Now, we pass to the weak formulation :
Thus, the coefficients are :
Coefficient |
Description |
Expression |
\(c\) |
diffusion coefficient |
\(r \hat{c} = r \mu\) |
\(\gamma\) |
conservative flux source term |
\(r \hat{\gamma} = \begin{pmatrix} - \lambda \left( r \frac{\partial u_r}{\partial r} + u_r + r \frac{\partial u_z}{\partial z} \right) - \mu \, r \, \frac{\partial u_r}{\partial r} - r \sigma_T & - \mu \, r \, \frac{\partial u_z}{\partial r} \\ - \mu \, r \, \frac{\partial u_r}{\partial z} & - \lambda \left( r \, \frac{\partial u_r}{\partial r} + u_r + r \, \frac{\partial u_z}{\partial z} \right) - \mu \, r \, \frac{\partial u_z}{\partial z} - r \sigma_T \end{pmatrix}\) |
\(f\) |
source term |
\(r \hat{f} + \begin{pmatrix} - \hat{c} \frac{\partial u_r}{\partial r} + \hat{\gamma}_{00} \\ - \hat{c} \frac{\partial u_z}{\partial r} + \hat{\gamma}_{10} \end{pmatrix} = \begin{pmatrix} r F_r - \lambda \frac{\partial u_r}{\partial r} - (\lambda+2\mu) \frac{u_r}{r} - \lambda \frac{\partial u_z}{\partial z} - \sigma_T \\ r F_z \end{pmatrix}\) |
3. Some Quantities
This section give some quantities usefull to explain the behavior of elastic phenomena.
3.1. Principle tensor
The matrix represenation of stress tensor \(\bar{\bar{\sigma}}\) is symmetric (it equal of its transpose \(\bar{\bar{\sigma}}^T = \bar{\bar{\sigma}}\)), thus it is orthodiagonalizable :
With \(M = \begin{pmatrix} \mathbf{n}_1 & \mathbf{n}_2 & \mathbf{n}_3 \end{pmatrix}\) orthogonal matrix (ie \(M^{-1} = M^T\)).
The eigenvalues \(\bar{\bar{\sigma_1}}\), \(\bar{\bar{\sigma_2}}\) and \(\bar{\bar{\sigma_3}}\) are called principles stress.
The eigenvectors \(\mathbf{n}_1\), \(\mathbf{n}_2\) and \(\mathbf{n}_3\) are called principles directions, they are the normal vector of principles planes.
The tensor stress exprim in principles directions haven’t got shear stress.
| Be carefull of choice of begining basis, if the stress tensor is exprim in cartesian or in cylindric, the principles direction are exprim in thise basis (but the principles stress do not change). |
In axisymmetrical coordinates, we have :
The principles stress become :
3.2. Stress Invariant
Some constant of stress tensor are invariant to the choice of basis used (cartesian, cylindric, spheric…), they call Stress Invariants :
3.3. Stress Deviator Tensor
The stress tensor can be writed like sum of two tensors :
With :
-
The Volumetric Stress Tensor : \(\hat{\pi} \, \delta_{ij}\), \(\hat{\pi} = \frac{\bar{\bar{\sigma}}_{xx} + \bar{\bar{\sigma}}_{yy} + \bar{\bar{\sigma}}_{zz}}{3} = \frac{1}{3} \, I_1\)
-
The Stress Deviator Tensor : \(\bar{\bar{s}}_{ij}\)
Thus, the Stress Deviator Tensor is writed like :
Like Stress Tensor, the Stress Deviator Tensor have invariant :
3.4. Von Mises Tensor
The solid material have three state :
-
Elastic region : The material can refind its form after deformation. This state apears for little deformation. The Hook Law is a modelization of elastic state.
-
Plastic region : The material can’t refind its form after deformation. This state apears for strongest deformation than for elastic state.
-
Fracture : Beyond a certain constraint, the material breaks down.
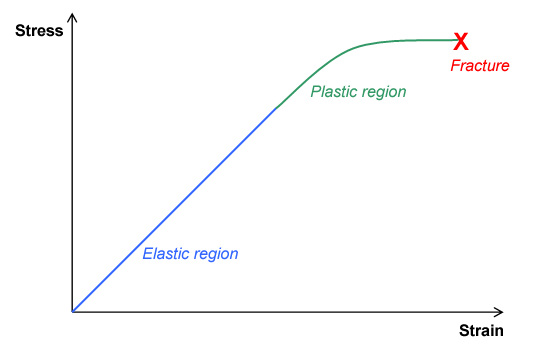
Three mechanical states of material
|
The Von Mises stress considers that yielding of a ductile material begins when the second invariant of deviatoric stress \(J_2\) reaches a critical value. The von Mises stress is used to predict yielding.
When the value Von Mises tensor is great than a pression give by the material, the material exits of elastic state and pass to plastic state.
The Von Mises stress is writed :
In axisymmetrical approximation :
3.5. Tresca Tensor
Like Von Mises tensor, the Tresca Tensor serves to predict the yielding of material.
When the value Von Mises tensor is great than a pression give by the material, the material exits of elastic state and pass to plastic state.
The Tresca Tensor is defined like :
4. Documentation
-
Elasticity adn toolbox Coefficient Form PDEs, Céline Van Landeghem, 2021, unpublished, Download the PDF
-
Coupled modelling and simulation of electromagnets in stationnary and instationnary modes (axisymmetric and 3D), J. Nadarasa, June 2 2015, unpublished, page 20-24, Download the PDF
-
Theorical Physics Reference, Ondřej Čertík, November 29 2011, page 85-90 Download the PDF
-
Cauchy stress tensor, Wikipedia, March 11 2021, Link to website
-
von Mises yield criterion, Wikipedia, March 11 2021, von Mises yield criterion